






1.硬件参数
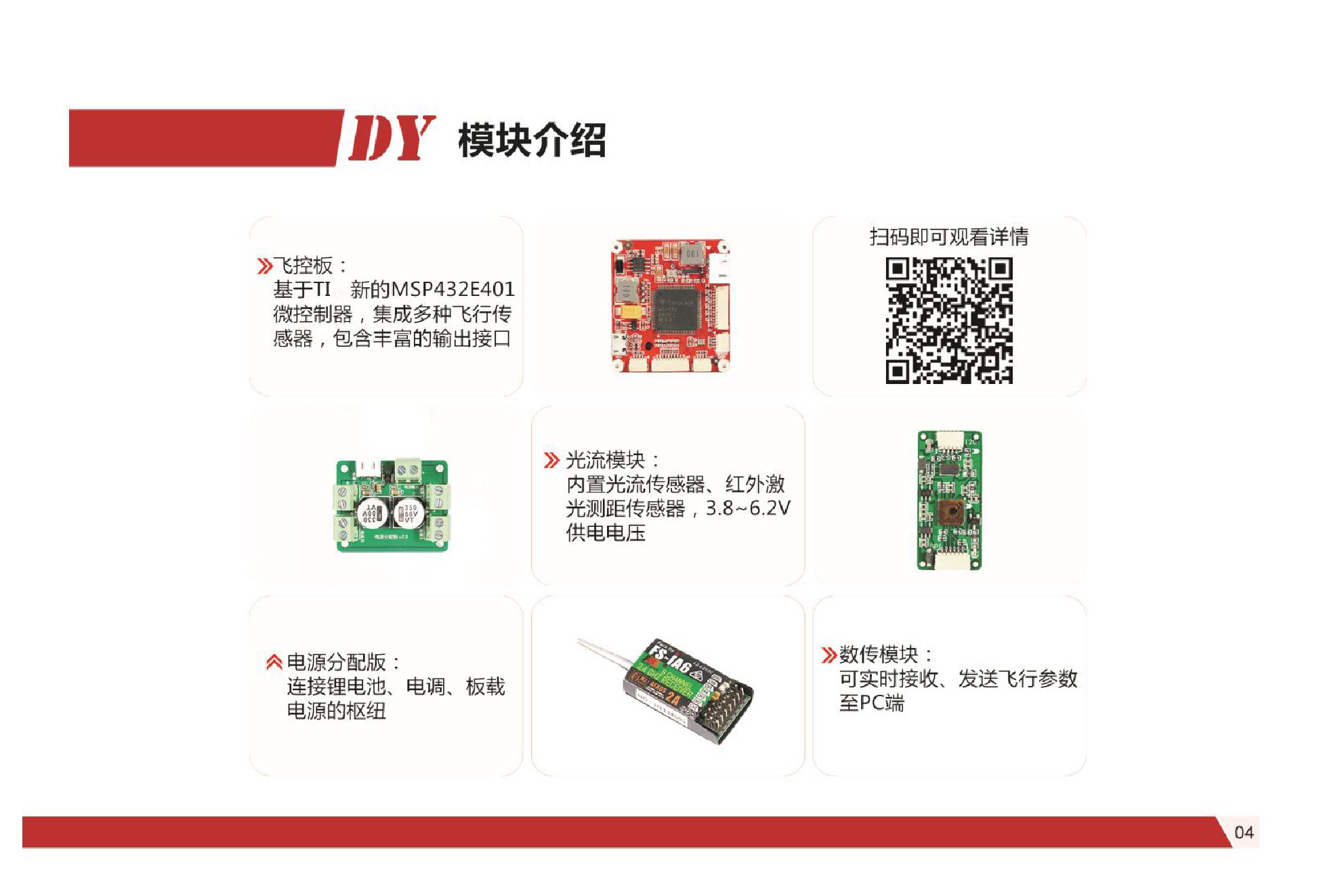
核心板 MSP430-LP 超低功耗MSP430F5529单片机开发板
超低供电需求:3.6V –> 1.8V
超低功耗模式:
- 主动模式(AM)
- 待机模式(LPM3)
- 关闭模式(LPM4)
- 关断模式(LPM4.5)
16位RISC架构
25-MHz系统时钟
统一时钟系统
低功耗电源管理系统
16位定时器TA0、TA1、TA2、TB0
两个通用串行通信接口(支持UART、SPI、IIC、IrDA)
全速通用串行总线(USB)
12位模数(A / D)转换器
比较器,硬件乘法器支持32位操作
三通道内部DMA
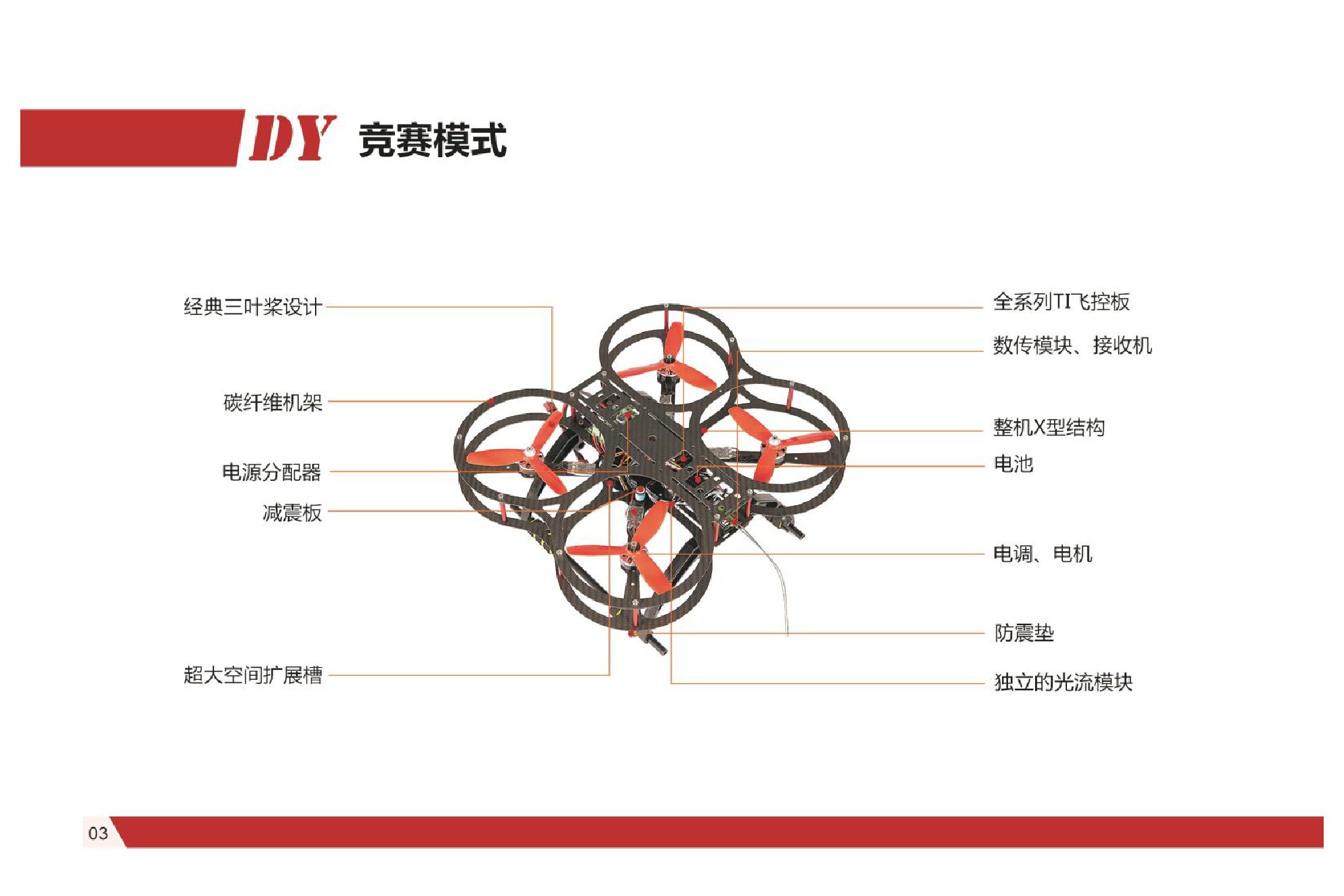
机架 FC- Frame 轴距:250MM
材质:玻纤
重量:290克
三叶正反桨:
尺寸:5寸
旋转直径:127mm
孔桨:5mm
桨根厚:5*4.5/8mm
单支重:5*4.5/6g
锂电池 3S 规格:LIPO 2200mAh 11.1v
持续放电倍率: 25C
最大瞬间电流:45C
插头:默认T插
Size:106 x 34 x 24mm(长*宽*厚)
充电环境:0 ℃ ~ 45 ℃
工作温度:-10 ℃ ~ 80 ℃s
成品重量:189.5g
Electrical无刷电机 M2204 技术参数:2300kv
重量:24g
进口NMB轴承
日本川崎低铁损硅钢片铁芯
耐温180度的N40SH磁钢
耐温180度无氧铜线绕组
CNC加工的高质量外壳
耐温200度硅胶线
集成 3 轴加速度计,3 轴陀螺仪和 3 轴磁力计
选择性输出姿态角,四元数和 9 轴原始数据
最高 300Hz 的数据更新速率
加速度测量范围: ±16g
角速度测量范围: ±2000°/s
磁场强度测量范围: ±4800uT
姿态角精度: 0.01°
超低功耗睡眠模式
灵活简易的可编程指令
2.软件参数
LED灯实验
外部中断实验
定时器实验
串口USRT通信实验
气压计数据采集实验
电池电量检测实验
9轴航姿传感器采集实验
四元数与欧拉角转换实验
无刷电机调速实验
超声波传感器实验
软件设置PID参数整定实验
无人机对轴平衡实验
无人机四轴平衡实验
无人机复合运动控制实验
无人机环飞实验